


An introduction to our new Summer 2021 series covering everything you need to know about sensor technology.
Reading Time: 4 Minutes approx. – 21.06.2021
“A leopard never changes its spots”, they say. For most parts of life, however, change is the only constant. Our industry, for instance, is under constant change, leading to industrial revolutions. Currently, we are undergoing the 4th industrial revolution, commonly referred to as Industry 4.0., in which traditional, mostly analogue, organisational processes are automated and digitalised utilising modern, smart technologies, such as smart machines and the internet of things (IoT). One of the key elements of automation are self-driving robots, so–called Automated Guided Vehicles (AGVs).
Definition, application and benefits of AGVs
They move and navigate autonomously, taking parts back and to across production sites and warehouses. With the E-commerce market booming, warehouse automation is crucial to improving efficiency and decreasing operating costs. According to Amazon, the average product handling lead time from shelf to packaging has decreased from 90 minutes to 15 minutes per order, illustrating a staggering performance optimisation.
AGVs offer a host of benefits: They ensure smooth workflows, supply both people and machines with parts and perform increasingly complex tasks. Thus, having AGVs travel safely and consistently is crucial to maintaining performance levels and avoiding downtimes. Consequently, when multiple AGVs are running across production facilities and warehouses in an Automated Guided Vehicles System, short AGVS, traffic management issues, such as collisions and deadlocks, need to be addressed.
Potential traffic management issues of AGVs.
Deadlocks can be described as circular wait between several AGVs due to limited capacities of free space, resulting in AGVs getting stuck waiting for one another, which in turn leads to a no-value output and wasted energy. Deadlocks can be prevented in three ways: Firstly, the system is built in such a way that no deadlocks can occur. Secondly, a special algorithm ensures that the controlled allocation of resources prevents the occurrence of deadlocks (“deadlock avoidance”). Thirdly, a special solution procedure detects and eliminates deadlocks that have already occurred (“deadlock detection and resolution”).
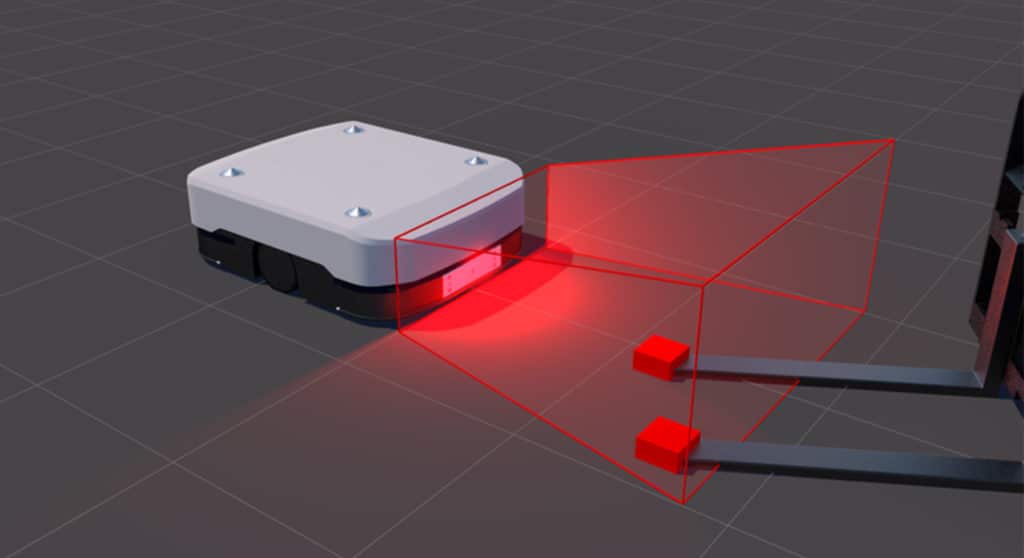
Whenever machines interact, be it with other machines and/or humans, there is an innate risk of collisions resulting in varying degrees of damages sustained, hence collision avoidance is crucial. Potential damage-causing objects include, but are not limited to, cranes hanging off ceilings, forklift forks and other protruding objects. In the U.S. alone, forklift accidents cost 135 million dollars annually. Consequently, AGVs must be able to perceive their environment thoroughly to prevent collisions and damages.
Sensor fusion and safety measures.
As the complexity of AGVS in warehouses and construction sites across the globe continues to grow, paths and networks are getting more flexible, comprising of both unidirectional and bidirectional paths, thus making it even more challenging for autonomous vehicles to navigate in such environments. To aid autonomous navigation, two types of reference fields are implemented into a system for better judgement and awareness of potential obstructions caused by persons and other objects: The outermost of the two fields is called “warning field”, instructing the AGV to decelerate in case an obstacle is detected within it. The most important field, however, is the inner “safety field”. If a person or object is detected in this area, the AGV will receive the information to perform an emergency stop. However, sensor types tend not to observe equally monitored areas, which is why in an ideal autonomous system, various sensor types are co-implemented. This is called sensor fusion. Combining different sensors increases the so-called Field-of-View (FoV) and with that the level of safe operation of an AGV. Due to the often-times heavy loads transported by AGVs and the resulting increased braking distance, a wide FoV is particularly important.
Sensor types used in AGVs.
Today, there are various methods in place to help AGVs perceive their environment and position themselves accordingly. These methods include sensing technology such as cameras, radar, lidar and 1D ultrasonic sensors (sonar). Especially in close range sensing, there is now an increased need for advanced 3D collision avoidance. This is where the 3D Ultrasonic Sensor produced by Toposens offers a solution to a wide range of issues. With an opening angle of up to 180 degrees in ultra-short range, it covers a wider FoV than other sensors, detecting complex objects such as forklift forks whilst delivering robust, light tolerant data. This in turn increases productivity and most importantly safety.
Want to know more about the different types of sensor technology used in AGVs? Watch out for our next blog coming up soon, in which we’ll dive deeper into the characteristics of the various types of sensors used in today’s Industry 4.0.
For more information on our state-of-the-art sensor solutions, do get in touch via sales@toposens.com.
Toposens GmbH was founded in Munich in 2015 and is made up of experts in embedded systems, hardware development, 3D sensing, digital signal processing and machine vision. Together, they have successfully developed the worlds-first 3D Ultrasonic Sensor based on the principle of bionic, mimicking the echolocation techniques of a bat, to deliver robust, low-cost and precise near-range 3D data points. Unlike existing sensor technologies, which can be negatively impacted by light conditions, reflections, and weather, Toposens created a system using real-time 3D data mapping and object recognition software to guide autonomous systems such as AGVs, even in the most difficult environments. Clients of Toposens include some of the world’s leading companies in robotics and automotive. The company is an active accelerator in the development of safety-critical autonomy and is based in Munich, Germany with presence in Sunnyvale, California.
